4軸ロボットアームの制御
使用ている制御ボードとマイコンについて
- Arduino Nano + 専用I/Oボード
- 動作電圧:5V
- デジタル入出力ピン:14本
- PWMチャンネル:6本(DIOと共用)
- アナログ入力ピン:8本 (距離センサーなどをつなげる)
- 専用I/Oボードにはデジタル入出力とアナログ入力6本を使用する仕様
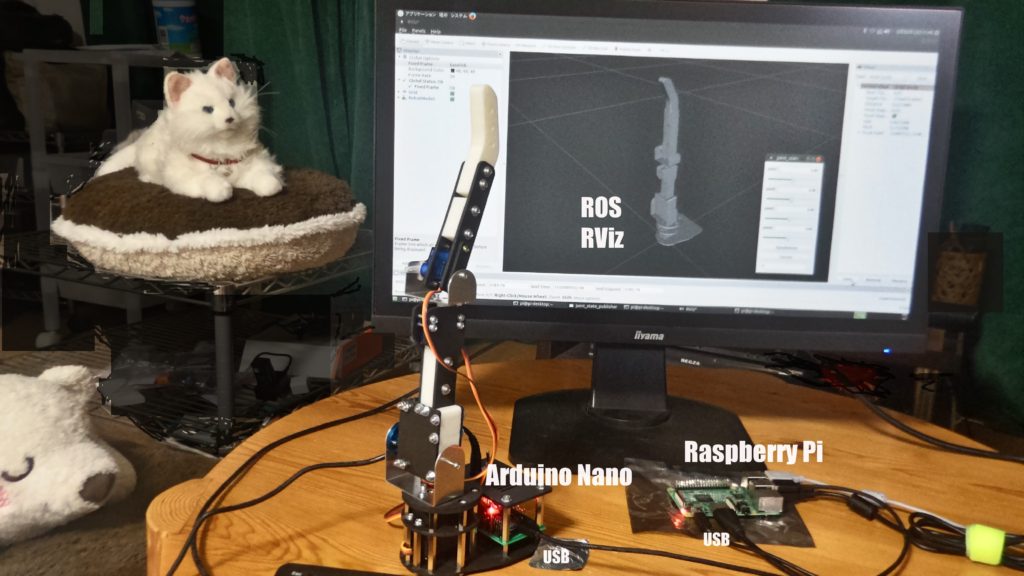
- Raspberrypi
使用しているソフトウェアについて
- ubuntu MATE (動作が軽いlinux OS)
- ROS (Robot Operating System Ver.18.04)
- RViz ( 3Dロボットシミュレータソフト)
- ROSとの連携も可能
かなりぎこちない動きですが、プログラムで改善できるはずです。
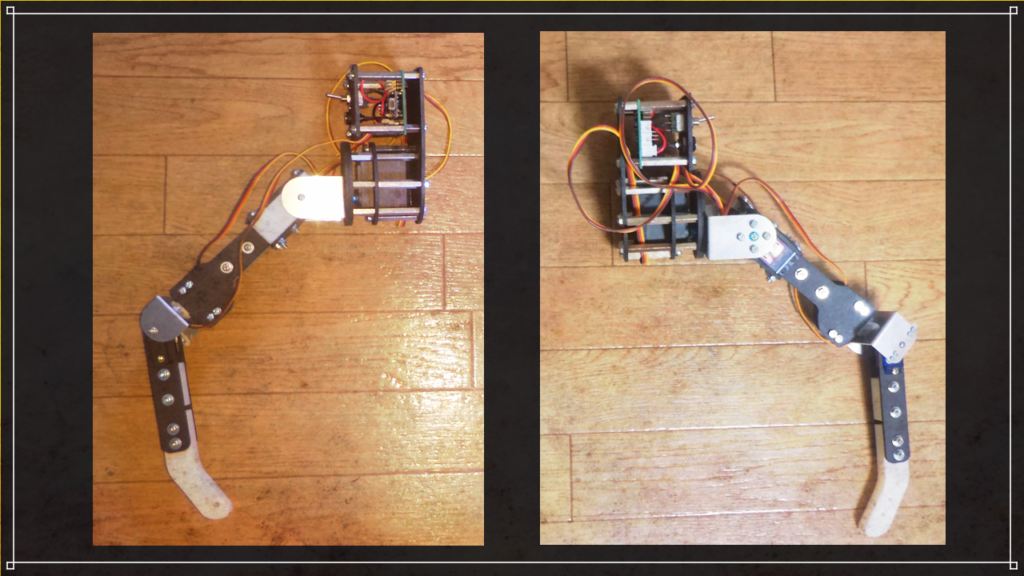
少し重さが気になりますが、左右別々に制御すれば、くーちゃんの両腕になりそうです。
実験で使用したアームロボットは、 SooZooRobo-TECHNO製 です。